Cheng_chi Diffusion Policy Visuomotor Policy Learning via Action Diffusion 2023
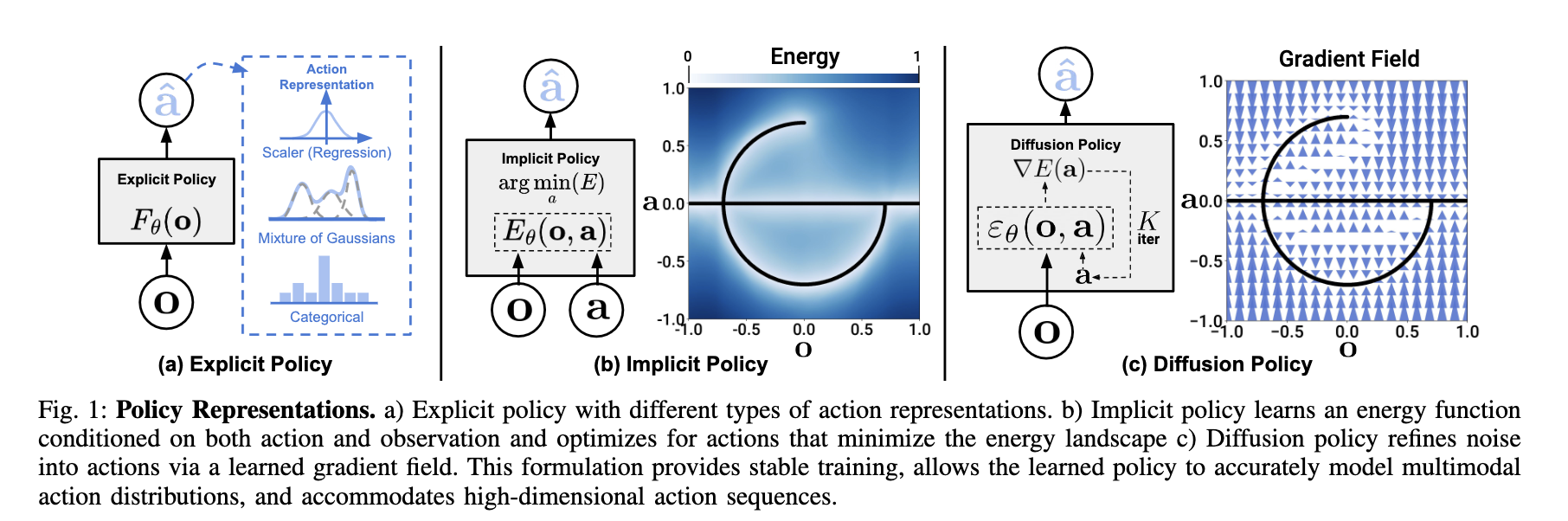
[TOC] Title: Diffusion Policy Visuomotor Policy Learning via Action Diffusion Author: Cheng Chi et. al. Publish Year: 2023 Review Date: Thu, Mar 9, 2023 url: https://diffusion-policy.cs.columbia.edu/diffusion_policy_2023.pdf Summary of paper Contribution introducing a new form of robot visuomotor policy that generates behaviour via a “conditional denoising diffusion process” on robot action space Some key terms Explicit policy learning this is like imitation learning Implicit policy aiming to minimise the estimation of the energy function learning this is like a standard reinforcement learning diffusion policy ...