[TOC]
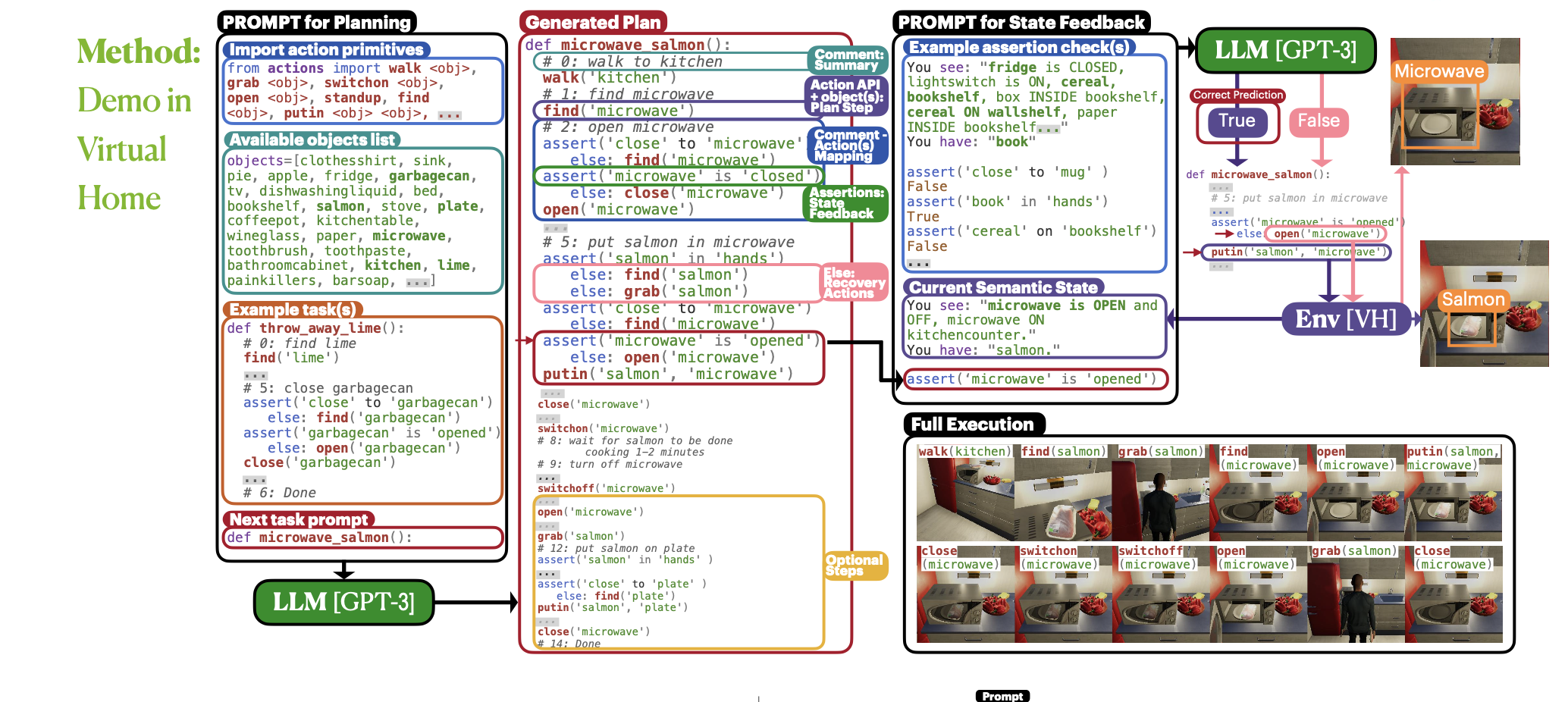
- Title: ProgPrompt: program generation for situated robot task planning using large language models
- Author: Ishika Singh et. al.
- Publish Year: 28 August 2023
- Review Date: Mon, Jan 29, 2024
- url: https://progprompt.github.io/
Summary of paper
Motivation
Classical Task planning
- requires myriad domain knowledge
- large serach space, hard toscale
- domain specific
- require concrete goal specification
Planning with LLMs
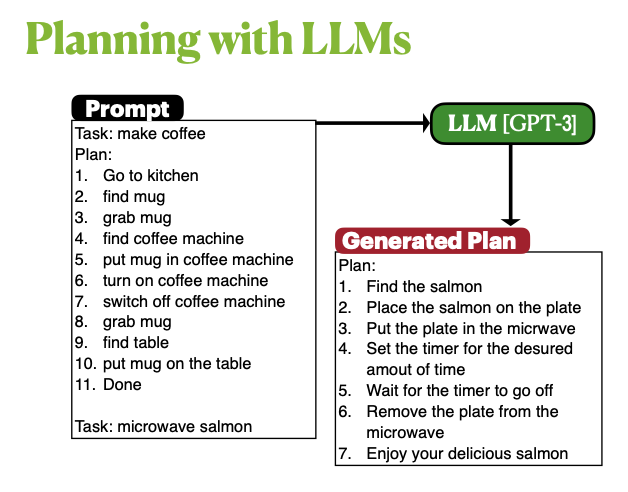
- LLM is not situated in the scene
- Plan steps using unavailable actions and objects
- Text-to-robot action mapping may not be trivial
- combinatorial admissible action space.
Contribution
- present a programmatic LLM prompt structure that enables plan generation function across situated environments, robot capabilities and tasks
