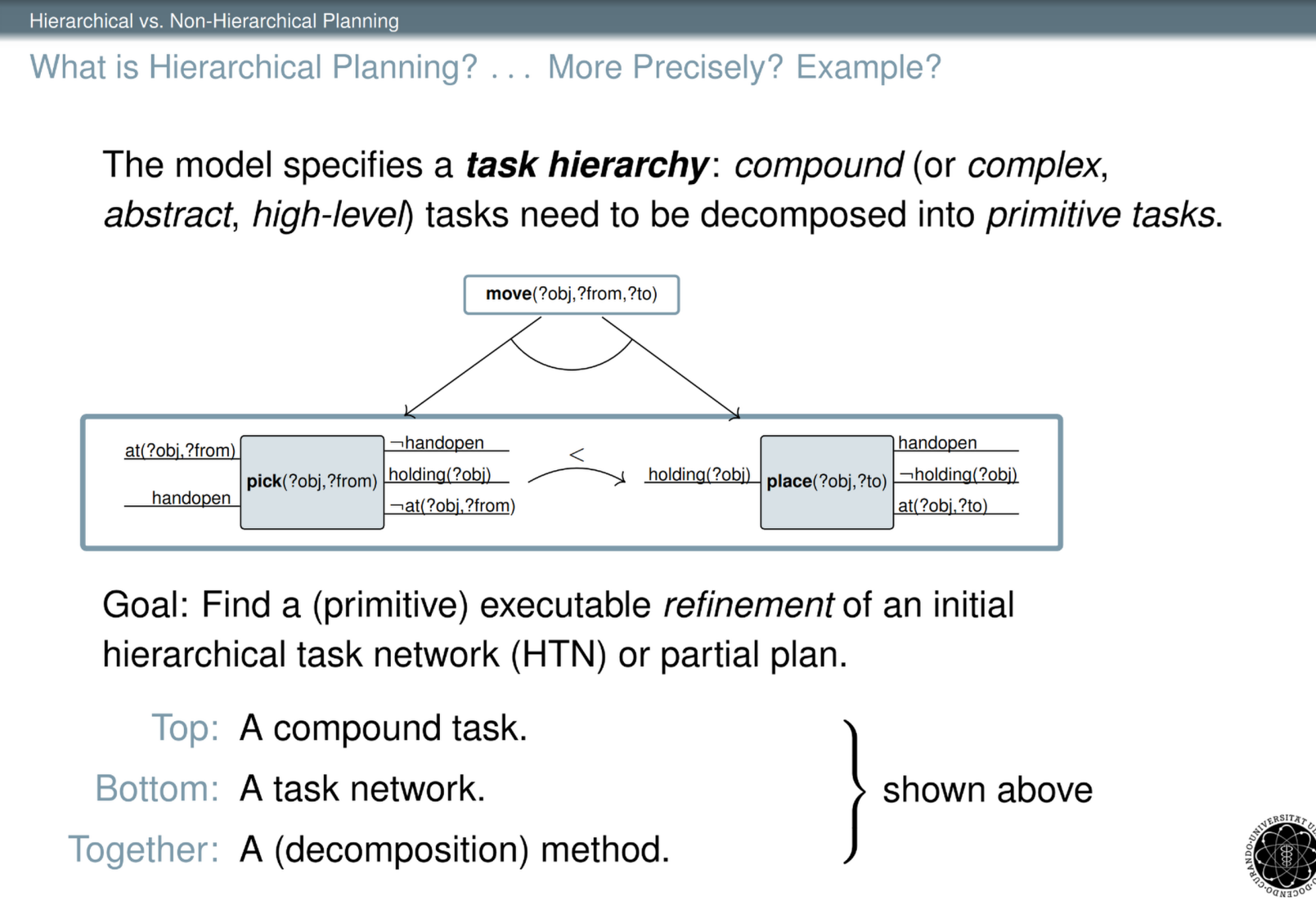
Overview of what is hierarchical planning

1. Daniel Hoeller’s dissertation
https://oparu.uni-ulm.de/items/a6c64b47-76e7-4532-8179-3e215a9eac9c
It has a summary of what is hierarchical planning
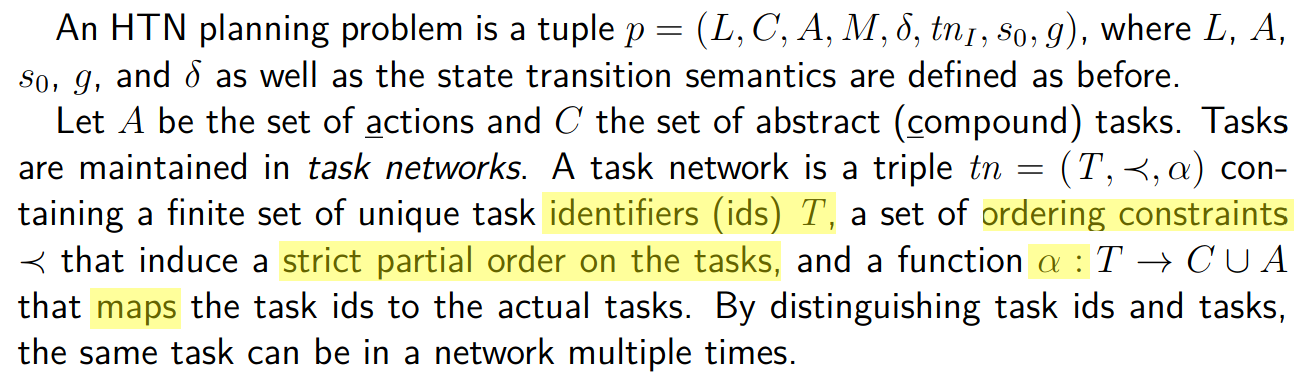
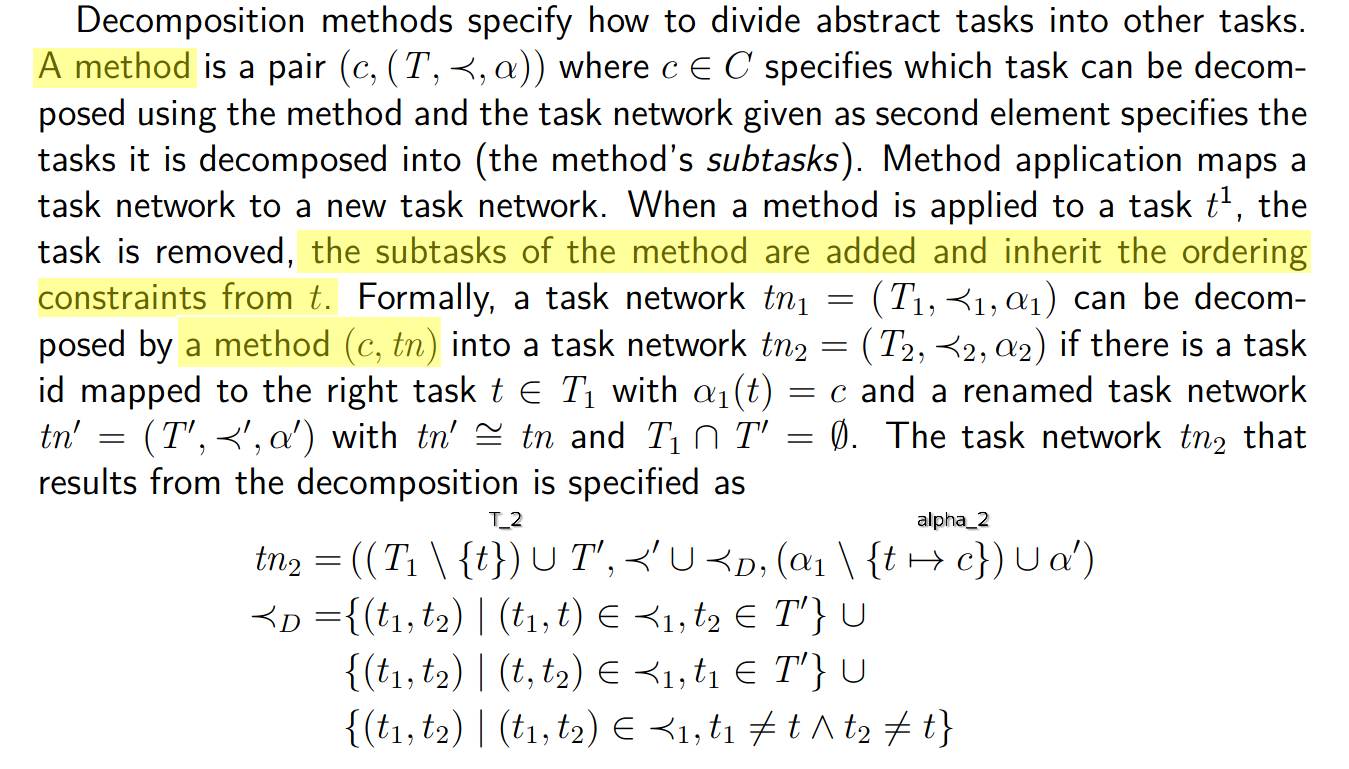
comment: a $t$ is a task id that can either refer to a $c \in C$ or an $a \in A$, but a method decompose $c$ only. Ok I see, the point, the whole thing trys to allow the set to have duplicate (? why not just claim that you have a multiset)
[!Note]
The ordering constraints the on the ids rather than the $c$ and $a$…
another question: why they want a renamed task network $tn’$ , why not just follow the original $tn$ in the $(c, tn)$ method?
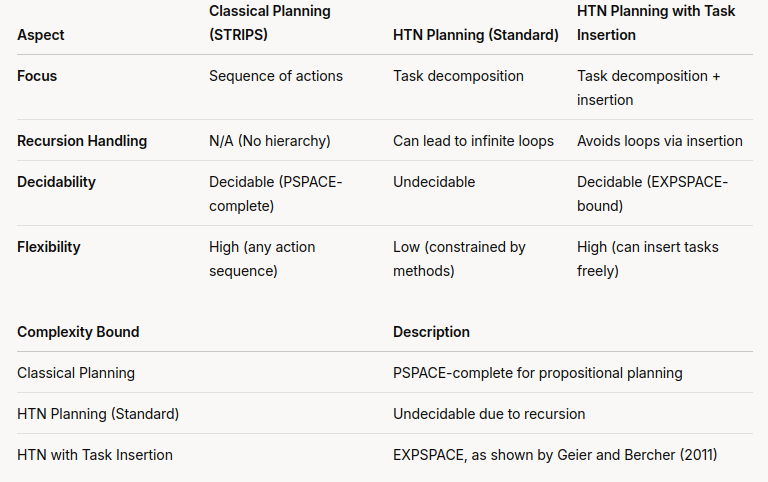
Task Insertion
Generated by Grok 3: Task insertion, as a variation in HTN planning, allows the planner to modify the task network by adding tasks apart from the decomposition process. This means the planner can insert both primitive and compound tasks, along with ordering constraints, at any point, not just through predefined methods. This extension, often referred to as hybrid planning, combines elements of classical and HTN planning, enhancing flexibility.
2. A Survey on Hierarchical Planning – One Abstract Idea, Many Concrete Realizations
https://bercher.net/publications/2019/Bercher2019HierarchicalPlanningSurvey.pdf
This gives you a survey about what is hierarchical planning and HTN planning
3. On the Decidability of HTN Planning with Task Insertion
https://bercher.net/publications/2011/Geier2011TIHTNDecidability.pdf
A more technical details about the formalization of HTN planning
A case study: Design a NPC in a video game using HTN planning
https://www.youtube.com/watch?v=Z7uU94yPfD4
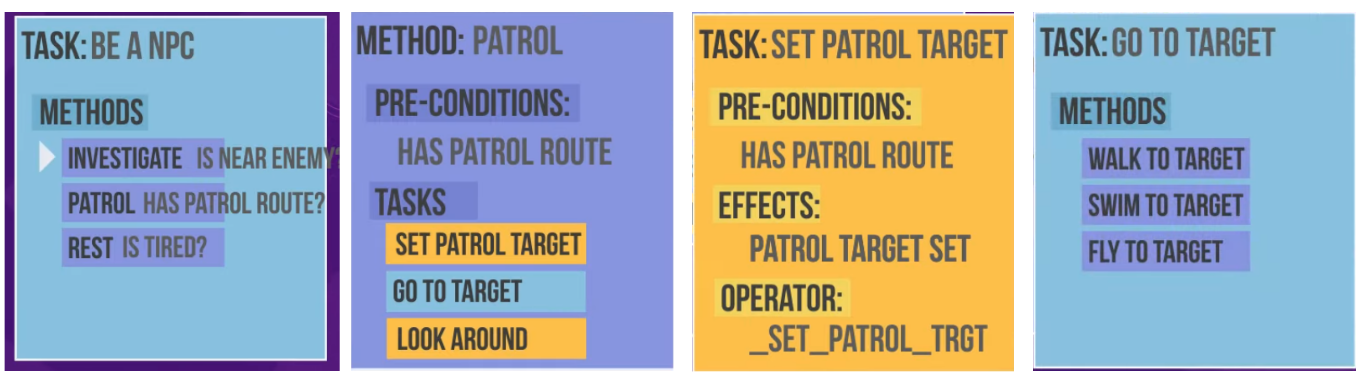
- Consider this scenario, you gather information from experts, from online sources, about the knowledge of the NPC behavior you want. And now you to model the NPC’s behavior
- in this case, you constrain the NPC to have three things in its behaviors – investigate, patrol and rest. These are at high level, as you can continue to define how to investigate, patrol and rest in a more detailed way (hierarchical planning)
- But this is somehow not the same as the level of hierarchy of the instruction discussed by Hector
(Bonus) Hector Geffner Learning general policies and sketches Slides
https://aair-lab.github.io/genplan23/slides/hector_geffner_genplan23_invited.pdf
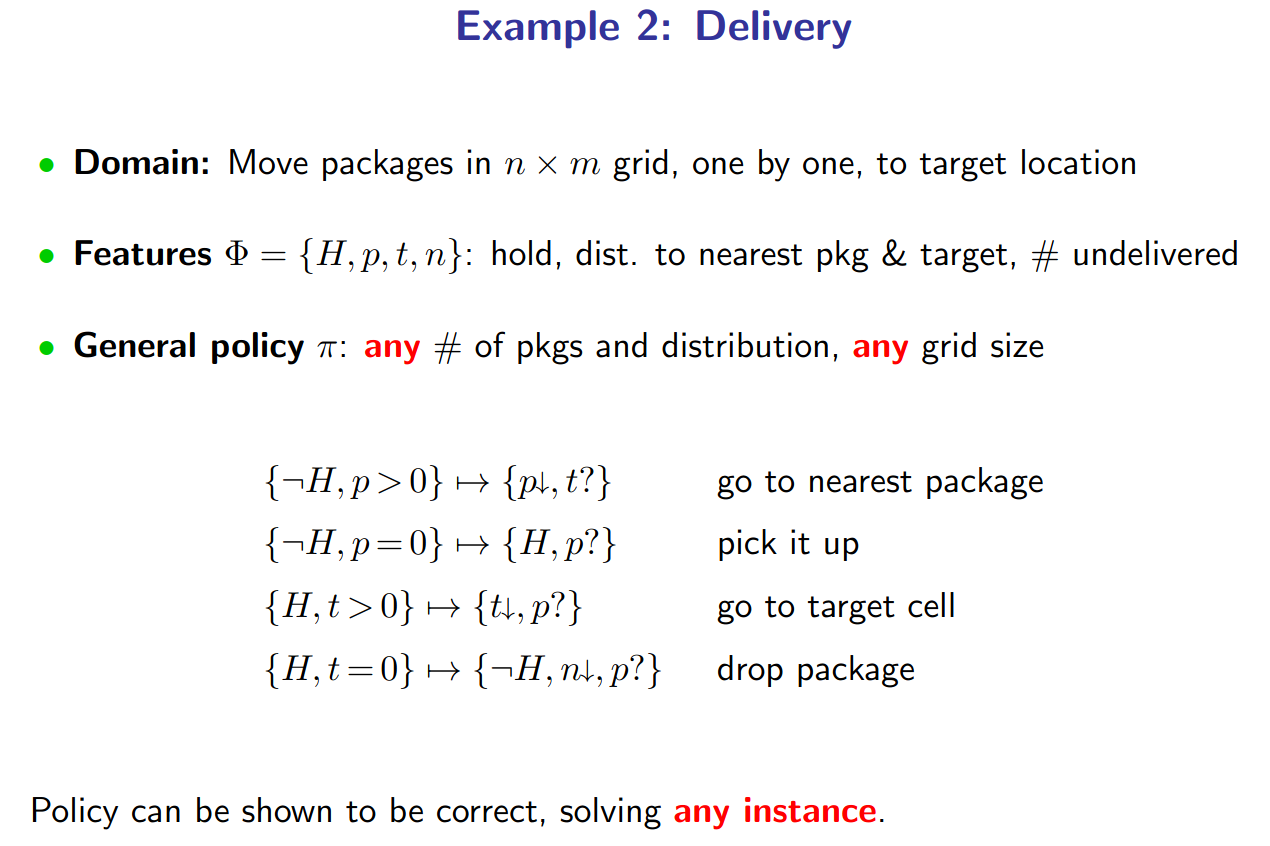
- But then we also have Hector Geffner try to corresponds the level of abstraction of language instructions as how many number of features that are important to this problem is involved when you construct the instruction (sketch)
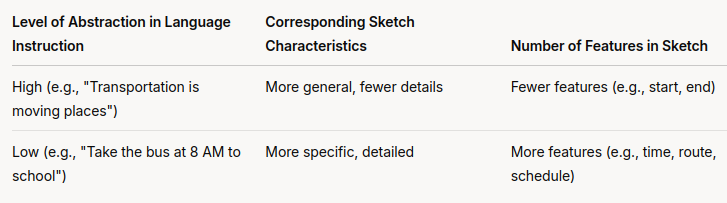
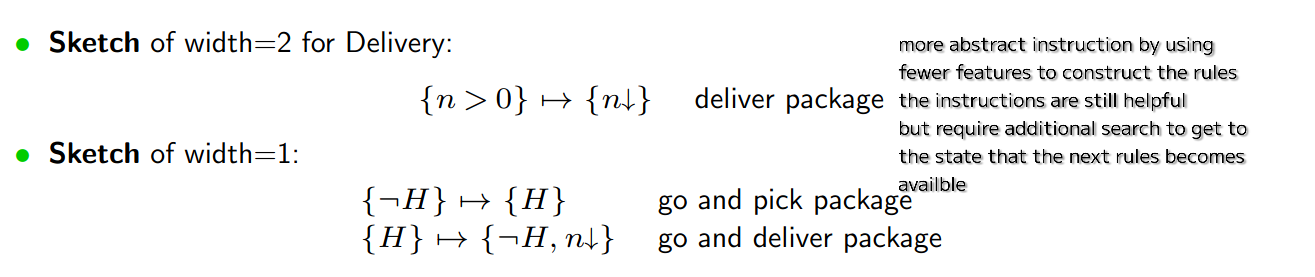

Somehow, “more general” in Hector means require more efforts to find a plan.
For natural language instructions, you may have this
- Delivering N packages involves (1) finding it, (2) carrying it and (3) delivering it.
- To deliver packages, you need to (1) keep decreasing the number of remaining packages you need to deliver, more specifically, (1) go and pick and (2) go and deliver
(Bonus) Introduction to HTN Planning Slides by Pascal
https://bercher.net/data/teaching/2018/HTN-Lecture/1-on-1/06--IntroductionToHTNPlanning.pdf