[TOC]
- Title: Framer: Planning Models From Natural Language Action Descriptions
- Author: Alan Lindsay et. al.
- Publish Year: 2017
- Review Date: Thu, Mar 9, 2023
- url: https://core.ac.uk/download/pdf/322329049.pdf
Summary of paper

Motivation
- for modelling assisting and model generation tools, there is a underlying assumption that the user can formulate the problem using some formal language.
- this motivates us to generate planning domain models directly from NL descriptions.
Some key terms
approach
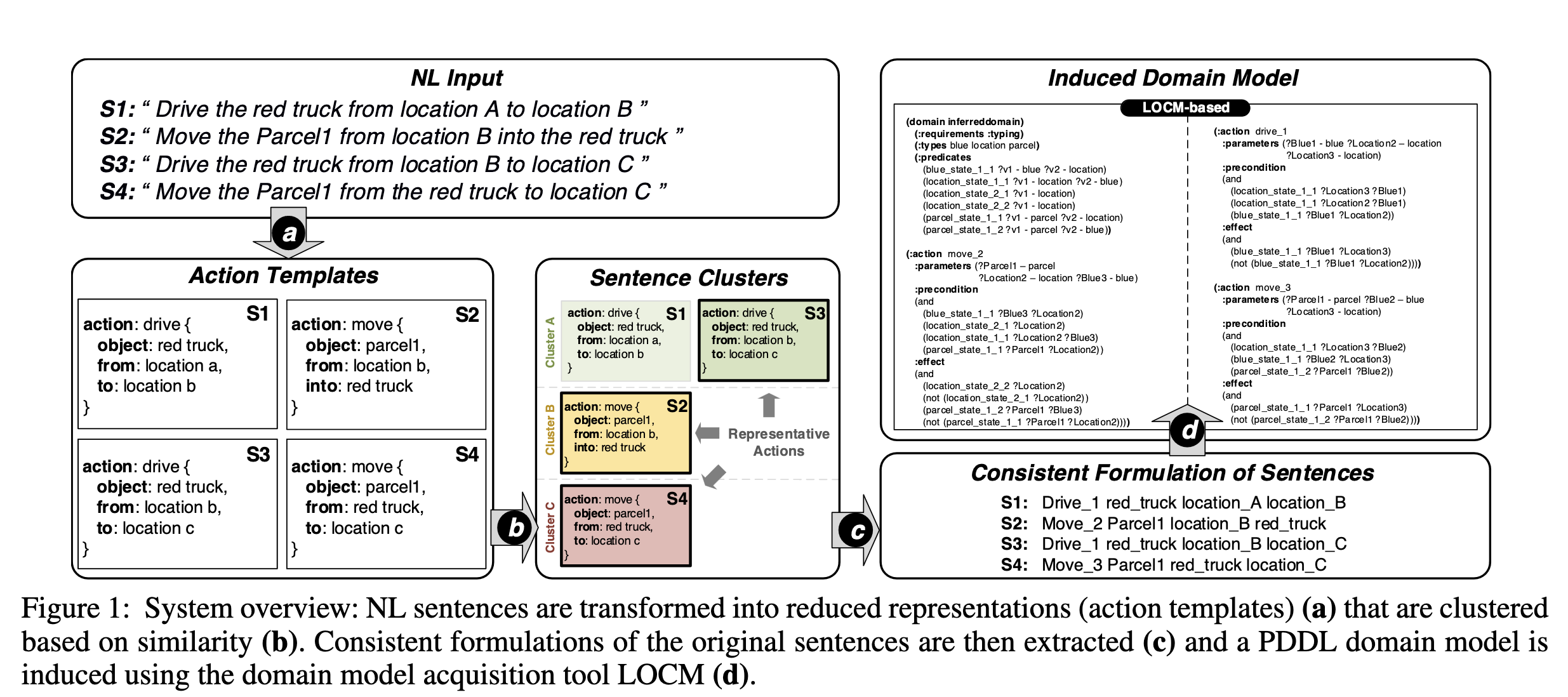
- we start from NL descriptions of actions and use NL analysis to construct structured representation, from which we construct formal representations of action sequences
- ? only action sequence? what about the environment
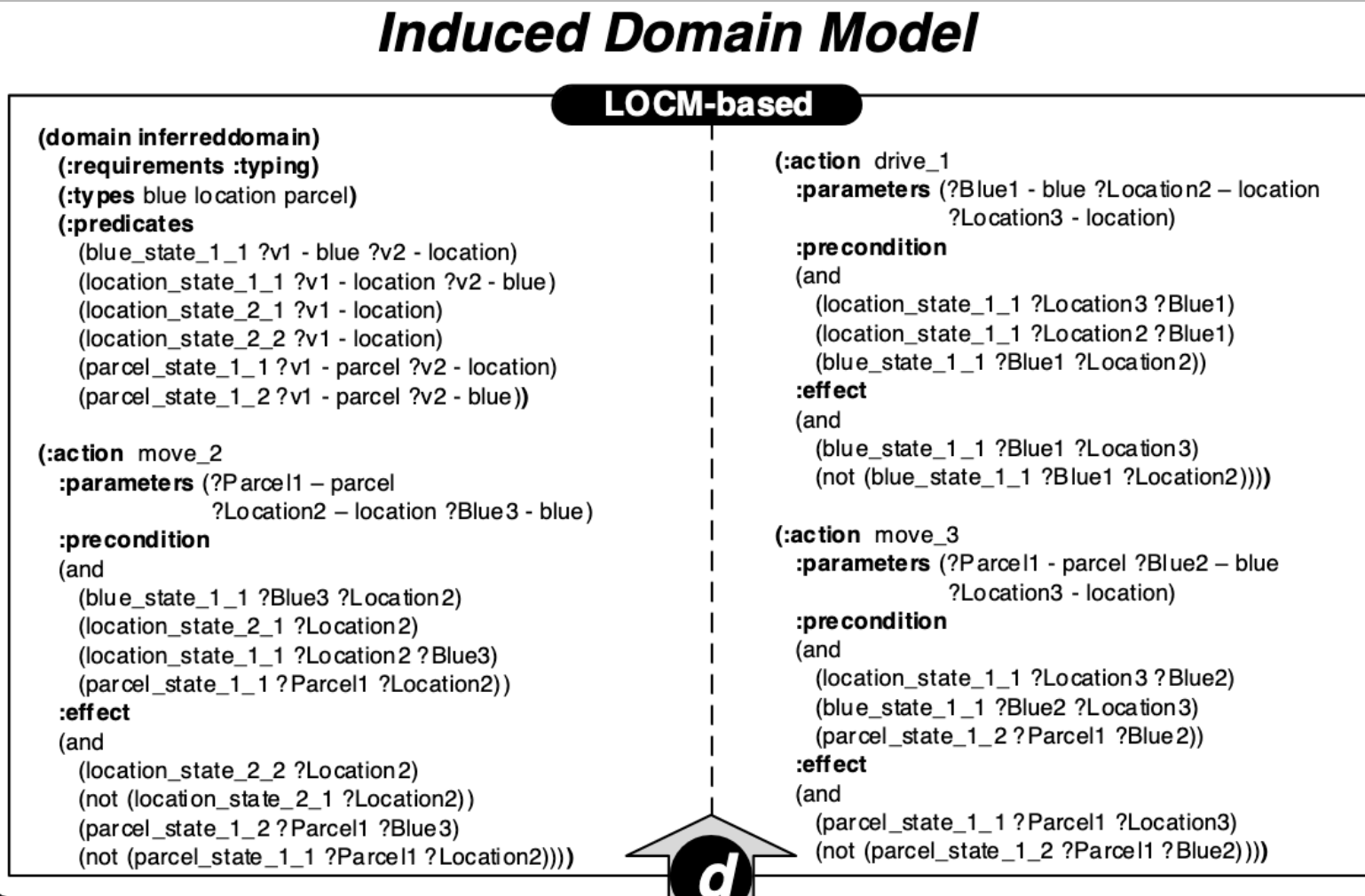
- the generated action sequence provide the necessary structured input for inducing a PDDL domain, using domain model acquisition technology.
- we use an estimate of functional similarity, so sentences that describe similar behaviour are represented by the same planning operator.
problem modelling
- Modelling problems appropriately for use by a computer program has been identified as a key bottleneck in the exploitation of various AI technology.
- in Automated Planning, this has inspired a growing body of work that aims to support the modelling process including domain acquisition tools.
PDDL
- check 2.1 domain and problem definition section of the introduction of PDDL book
- PDDL divides the definition of a planning problem into two parts: the domain defines the state variables (facts that may be true or false) and actions, while the problem defines initial state and the goal condition.
- the domain definition is a general model of the relevant aspects of the world in which we are planning, while the problem definition is a specific problem instance in this domain that specifies where we begin and what we must achieve.
- the :predicates section of the domain definition contains the list of the model’s state variables. These are binary variables, meaning they represent facts that are either true or false.
PDDL versions
- PDDL 2.1 and + : extends the numeric and temporal representation to hybrid planning
- PDDL 2.2: add Axioms, which add more expressive conditions to classical planning, and timed initial literals, which provide a syntactic convenience for defining a schedule of predictable events in temporal planning
- PDDL 3.0: add syntax for temporally extended goals and preferences to classical planning
- PDDL 3.1: defined the restricted syntax for specifying action costs
Domain Model acquisition tool LOCM2
- LOCM2 is used to generate domain file from the action sequence
- why domain file
- domain file specifies the action info and the state variables info( i.e., predicates)
Potential future work
- maybe we can generate a more complicated PDDL domain file based on the low-level descriptions
- yes we may generate useful action information based on the collected NL descriptions
- it might be difficult to generate predicates and types
- also, the initial exploration is to generate the initial state of the PDDL problem definition, there should not be ambiguous initial state information. (? or there could be, ask Nir about this idea)